ROBO si muove nel mondo osservando gli oggetti che lo circondano e prendendo delle decisioni conseguenti.
Esercizio 1
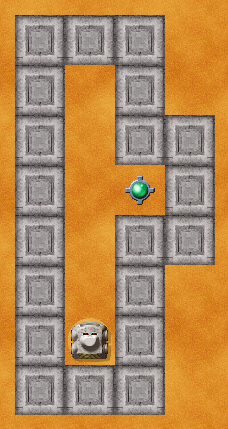
ROBO avanza fino ad avere un faro alla sua destra
|
1 2 3 4 |
repeatWhile(not rightIsBeacon) { forward(1) } |
Esercizio 2
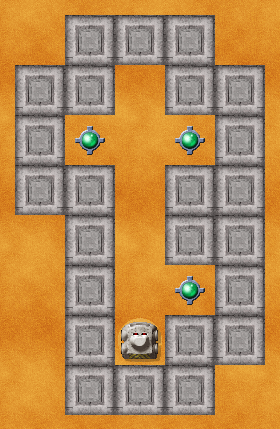
ROBO avanza fino ad avere un faro sia alla sua destra che alla sua sinistra
|
1 2 3 4 |
repeatWhile(not (rightIsBeacon and leftIsBeacon)) { forward(1) } |
Esercizio 3
Segui i passi
- Raccogli il primo faro
- Posalo in prossimità degli altri due…
|
1 2 3 4 5 6 7 8 9 10 11 12 |
repeatWhile(not rightIsBeacon) { forward(1) } right pickUp left repeatWhile(not (rightIsBeacon and leftIsBeacon)) { forward(1) } putDown |